Purdue IEEE Application Board
This board was developed for the Purdue ROV team to read sensor data and control various tools. This way, all the missions specific circuitry is kept on a single board that can be swapped out from year to year and minimize costs.
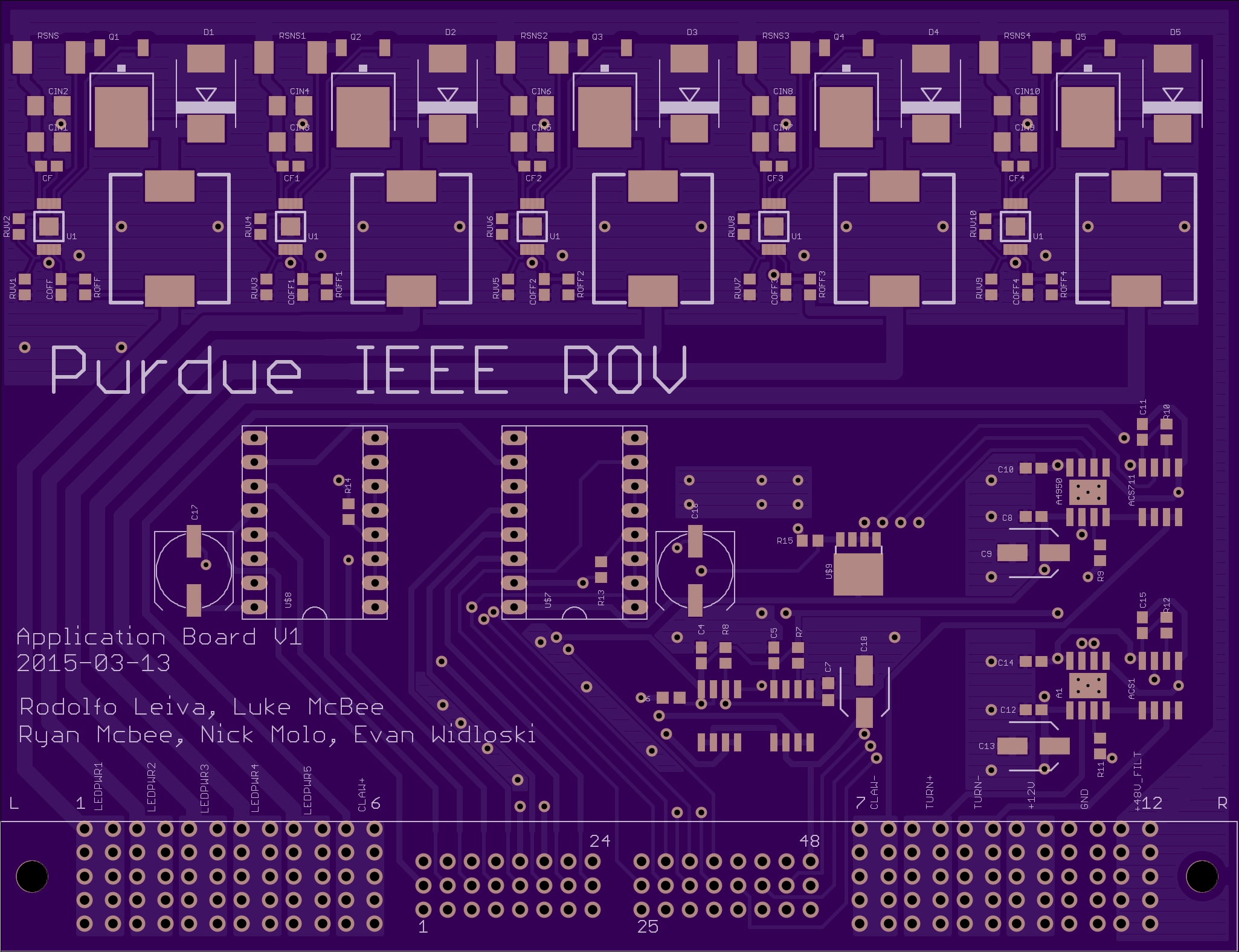
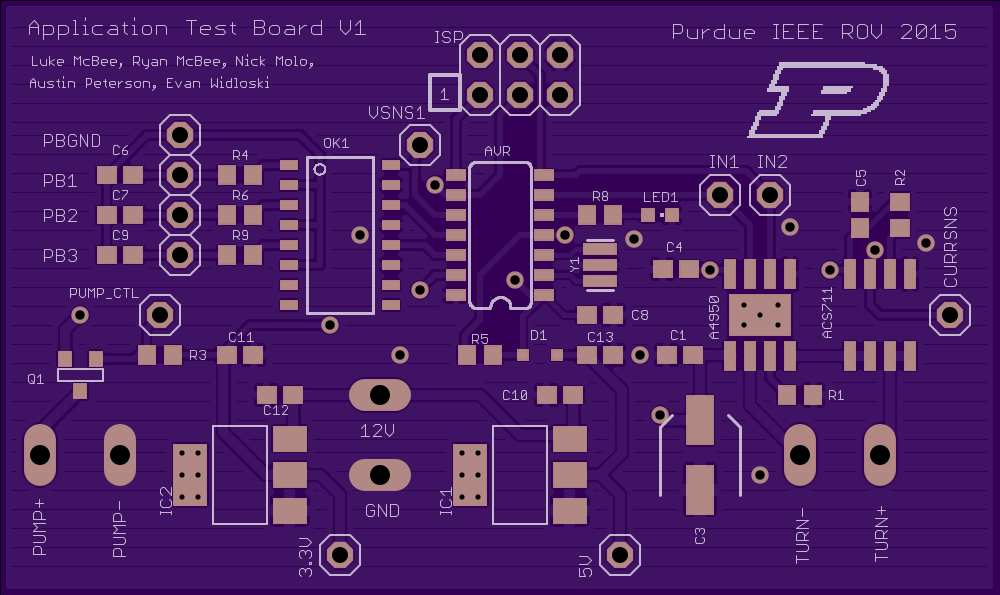
Shown above is a test unit to make sure the design worked with our various peripherals. Below is the final design with the following features:
- 5 high power LED drivers for ROV floodlights
- 2 current-monitored stepper drivers for camera gimbal
- 2 current-monitored hbridges for a valve turner and gripper
- 2 servo current monitors for the gripper fingers
- isolated volt meter (on back)
- simple on/off control for a pump